液压系统的电子控制
移动设备在技术方面变得越来越复杂,对液压系统进行电子控制控制的需求也在随之攀升。
电子元件的坚固和可靠性已经得到大幅提升,现在已经可以承受移动设备应用中的恶劣环境条件。
复杂的电子控制器通常只提供低能量控制信号。用于电磁驱动的液压阀时,通常需要对控制信号进行放大。用于液压设备的电子控制器通常都配有所需的放大功能。
为什么选用脉宽调制 PWM?
对阀的线圈施加电压后,线圈中的电流会产生磁场,从而产生力使滑阀芯或锥阀芯移动。输入电压除以线圈电阻等于通过线圈的电流。用于开关阀时这一点非常明显,但是对于比例阀而言,只有当通过改变输入电流,可以准确地控制阀芯位置时才有用。
使用简单的可变电阻可以改变电阻值,从而改变输入电流。这种控制方法效率较低,而且不适于要求大电流的场合。同时,如果将连续变化的 DC 信号用于驱动比例型电磁阀,放大器的输出晶体管将起到变阻器的作用。它可以将电源电压降到电磁线圈在某个时刻要求的电压值。线圈的满电流可能达到几个安培,需要流经输出晶体管。结果晶体管就会发热,因而需要大型散热底座来散热。
脉宽调制 (PWM) 是一种控制技术,可以克服上述问题。使用 PWM 时,输出晶体管将用作开关,为电磁线圈提供一系列电压恒定的开关脉冲。脉冲的频率也是固定的,通常为 400~5000+ Hz。信号的大小可通过改变“开”脉冲相对于“关”脉冲的时间长短来确定。
这种技术的优点在于:在“关”脉冲期间,输出晶体管中无电流通过;在“开”脉冲期间,晶体管两端理论上没有电压降,因而产生的热量也微乎其微。实际应用中,“开”脉冲期间晶体管两端会有很小的电压降,在开和关之间切换所需的时间也是确定的,因而会产生很少的热量。但是,这部分热量与传统 DC 输出信号产生的热量相比简直微不足道。
PWM 已经成了各种阀放大器的标准,以便减小放大器的体积和功率消耗。使用该技术时,无需对电磁阀进行改装。使用 PWM 可以有效控制流向比例阀线圈的电流。使用 PWM 时,还可以通过电子方式进行电流调节、颤振、斜坡、短路保护以及去处死区。
PWM 的工作原理
PWM 信号不是恒定不变的,而是开启一段时间,接着关闭一段时间(参见图 1)。
.jpg)
工作周期中的“D”指的是周期的“开”部分。工作周期可能位于 0(信号常闭)到 1(信号常开)中的任何位置。50%“D”将形成完整的方波。
PWM 信号的频率可以很低 (100~400 Hz),也可以很高(高于 5000 Hz)。高频 PWM 将产生更恒定的无波纹电流输出,因而效果会更好。
线圈电感
电感是电路阻止电流启停或变化的特征。电气系统中的电感与机械系统中的惯性类似。电感将在工作周期的波形中产生时间延迟。理论上,波形应该是完整的矩形,有电流时即可上升,无电流时即可下降。由于电感的影响,实际上波形的上升和下降是逐渐的过程(参见图 2)。
.jpg)
PWM 电流特性
外加 25% 的信号时,“D”比电流达到最大值所需的时间短(参见图 3)。这就使得作用到阀线圈的电流输出变小,进而导致阀的液压输出变小。如果 PWM 的频率足够低,在关期间电流将会降到零。这称作“不连续电流”。
.jpg)
颤振(电流波纹)
粘连和磁滞可使液压比例阀的行为异常而且无法预知。
如果输入信号变化很小,粘连使得阀芯不能移动。当信号最终变得足够强大,可以使阀芯移动时,阀芯又会超过精确控制要求的位置。
信号在上升或下降变化的过程中,即使控制信号的输入值相同,阀芯的移动情况也会有所不同,这种特性称作磁滞。
颤振指的是阀芯在期望位置的附近快速地小范围移动。颤振使得阀芯不断移动,从而避免了“粘连”,并且有抵消磁滞的作用。颤振的振幅应足够大,频率应足够小,从而为阀芯留足响应时间。
颤振是由线圈中的电流“波纹”引起的—电流在所需的控制信号值附近波动。由于惯性的存在,与高频波纹相比,阀芯可以更好地响应低频波纹。波纹的振幅决定了阀芯在给定频率的情况下可以移动的距离。
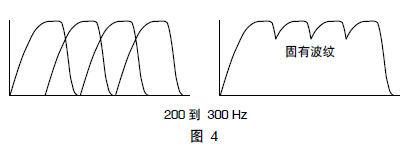
低频 PWM
典型的低频 PWM 小于 400 Hz,它会附带地产生颤振(电流波纹)(参见图 4)。PWM 的频率足够低,因而电流在下次上升前有衰减时间。颤振(波纹)的强度随着线圈中平均电流的变化而变化。 颤振在 50% D 时达到最大,在 0% 和 100% D 时减为 0。因此,某些电流值产生的颤振会过大,而某些电流值产生的颤振却不足。
当平均电流确定时,颤振电流的振幅是线圈电感和PWM频率的函数。线圈的电感很大程度上是其额定电压和功率的函数。与高功率线圈相比,低功率线圈的电感通常较大—因此在给定 PWM 频率时附带产生的颤振较少。
阀的设计不同,对相同的颤振频率和振幅的响应也不同。虽然改变 PWM 的频率可以调节颤振,但其振幅和频率不能单独调节,而只能根据不同阀的设计来设定。
高频 PWM
当 PWM 的频率足够高(通常高于 5000 Hz)时,在各种实际应用中,线圈中的电流都是恒定的(参见图 5)。高频 PWM 不会附带地产生颤振。
.jpg)
使用高频 PWM 的优点在于可以单独产生颤振,然后将其叠加到输出电流之上(参见图 6)。这样,用户就可以单独控制电流,以及颤振的频率和振幅。这样的颤振可以在各个电流水平保持恒定,其频率和振幅也可由用户调节,从而使特定液压阀的性能达到最优。
.jpg)
斜坡
斜坡用于减缓阀驱动器对输入命令变化的响应。这样,当命令输入信号突然发生变化时,就可以有个平缓的过度。如果输入信号的改变所需的时间比斜坡设定时间长,则斜坡将没有效果。
斜坡可以是固定的或可调的,可以对称或独立,也可以是单斜坡或双斜坡。可调斜坡的工作时间通常为 0 至 8秒,由电位器控制。单边斜坡通常用于仅需要考虑加速的慢速切换控制。
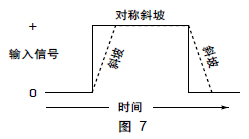
对称斜坡(参见图 7)由单电位计控制,对上升和下降斜坡的调整也是相同的。
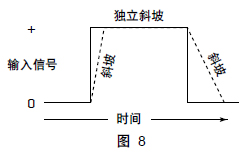
独立斜坡(参见图 8)的上升和下降边分别配有电位计,加速和减速可以独立设置。
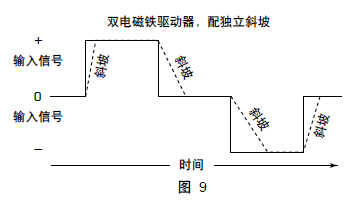
双线圈双向阀的驱动器的每个线圈各有两个独立的斜坡,因此一共有四个独立的控制斜坡(参见图 9)。
增益或最大电流
放大器的增益指的是较大的输出信号(至阀)与较小的控制输入信号的比值。
增益=输出信号÷输入信号
增益通常由放大器上的分压计调节。调节通常称作“最大电流”调节,调节最大电流即可调节放大器的增益。通过这种方式,可以调节输入信号达到最大时,放大器的最大输出(对阀的设置进行控制)。
启用/禁用
有些控制器/放大器含有“启用”功能。这是一个用于确保安全的特性,在启用连接后,只有电压达到了特定的值,控制器的输出才能开始工作。启用选项可用于紧急停机开关或其他安全互锁装置。
虽然在电源处设置紧急停机开关是可行的,但我们不推荐这种操作,因为开关断开后,电容器中存储的电荷仍可使阀信号维持一段时间。
死区/最小电流
阀芯式比例阀通常有一定的阀芯重叠,从而产生死区。对于压力和流量控制器,死区发生在阀芯开始移动时。对于方向阀而言,死区发生在中间位置。阀芯重叠减少了零位置时的泄漏,也为断电或紧急停机提供了更大的安全性。阀芯重叠后,电磁线圈中的信号必须达到特定的最小强度,系统才会出现明显的动作。
如果不需要该特性,通过设置控制器/放大器的最小电流(I-Min.),也可以去处压力和流量控制器的死区。如果将最小电流调到零点以上,阀芯在上电后会即可跳跃至此位置,而不存在死区。
请注意:最小电流的设置会影响最大电流的设置,因此应首先设置最小电流。
如果使用多功能/双电磁阀驱动器控制方向阀,通过拨码开关来启动死区消除功能。死区大小通常由工厂设定,视具体应用而定。
电流反馈
流过电磁线圈的电流会产生热量。产生的热量将使线圈的电阻增大。例如,如果线圈在 20℃ 的电阻为 7 欧姆,100℃ 时的电阻就可能达到 9 欧姆。电阻增大后,线圈功率将会变小,结果导致阀设置变低。
为了补偿温度带来的变化,有些控制器/放大器配有“电流反馈”功能。在电路中为电磁线圈串连一个电流反馈电阻后,就可以使电磁线圈中的电流与输入信号的电压成比例,而与电磁线圈的电阻无关。电源电压必须足够大,以便克服增大的电阻。
下载